|
FDCL Controllers
|
Control class used to generate motors outputs for a desired trajectory. More...
#include "common_types.hpp"#include "fdcl/param.hpp"#include "fdcl/integral_utils.hpp"#include "fdcl/matrix_utils.hpp"#include "Eigen/Dense"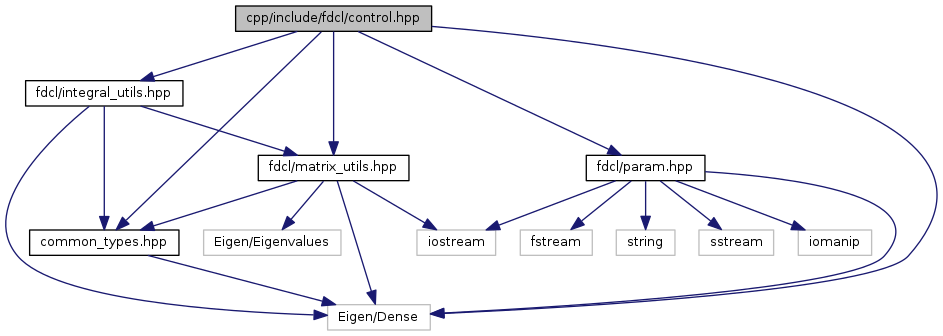
Go to the source code of this file.
Classes | |
| class | fdcl::control |
| Controller functions for the rover. More... | |
Control class used to generate motors outputs for a desired trajectory.
 1.8.11
1.8.11

